NVIDIA Omniverse升级:OpenUSD赋能物理AI,重塑机器人与虚拟环境开发新范式
NVIDIA在SIGGRAPH大会上发布了其Omniverse平台的多项更新,重点在于增强OpenUSD在物理AI工作流中的应用,旨在加速机器人、自动驾驶及工业系统等领域的发展。此次更新包括新的Omniverse库、Cosmos世界基础模型(WFMs)以及一套面向开发者的工具,核心目标是简化构建物理精确的虚拟环境和理解真实世界的AI代理。
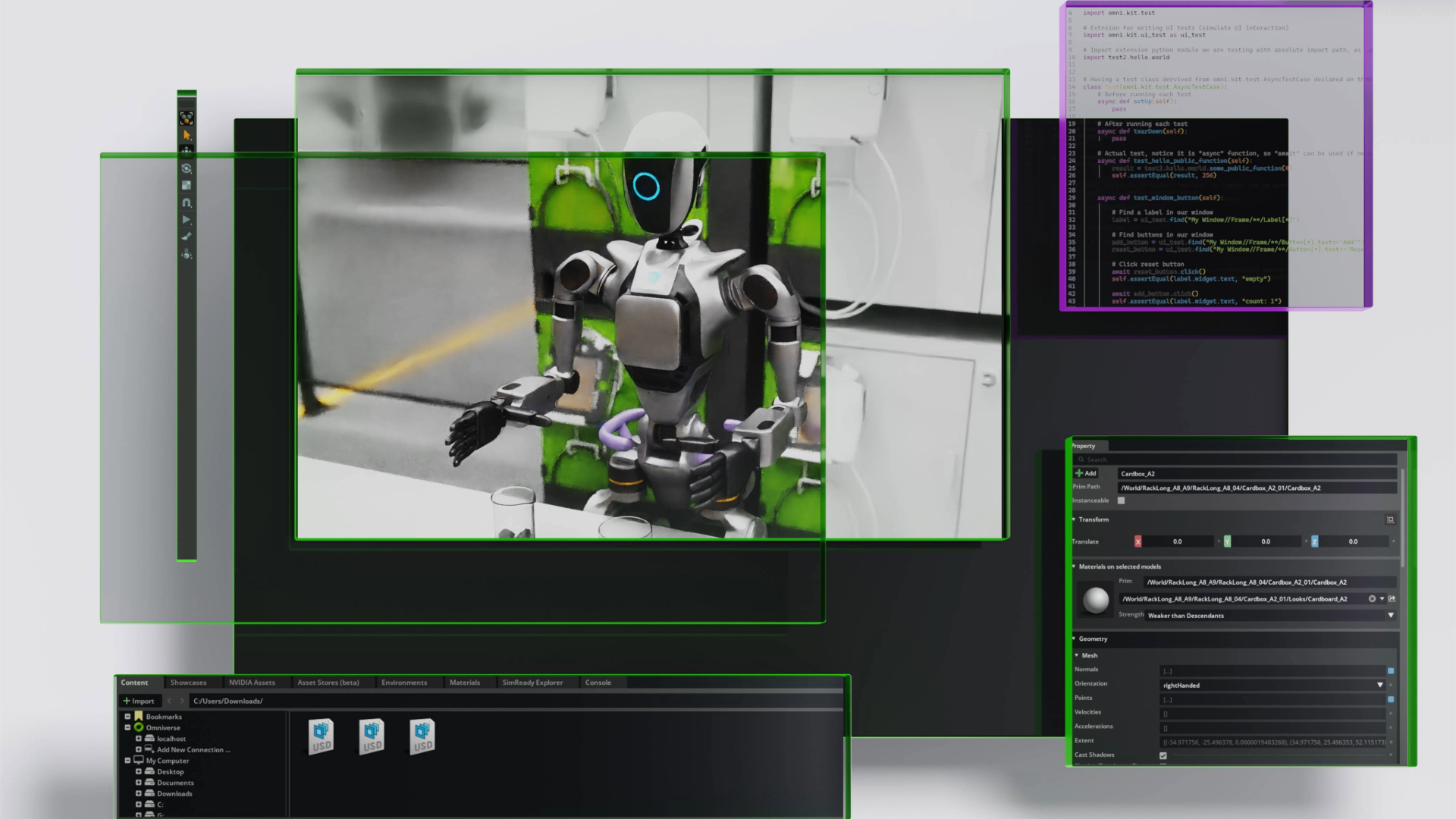
此次发布的核心亮点在于OpenUSD Exchange SDK 2.0的推出,该SDK引入了UsdPhysics模块和分层资产结构,使得物理属性可以直接集成到机器人模型中。同时,NVIDIA推出了SimReady材质库,这是一个包含数千种基于USD和MaterialX/OpenPBR的材质的开源集合,支持视觉和非视觉渲染,为AI传感器模拟和物理交互提供高保真度。此外,NVIDIA与Google DeepMind合作,通过新的mujoco-usd-converter工具,实现了MuJoCo(MJCF)与USD格式之间的数据互操作性,极大地提升了机器人数据生成的准确性和一致性。
NVIDIA Omniverse NuRec库则结合了RTX光线追踪和3D高斯泼溅技术,能够将真实世界的传感器数据高效转化为高保真度的OpenUSD仿真环境。这些技术和工具的整合,如Isaac Sim 5.0和Isaac Lab 2.2的早期预览版,正被Amazon Lab126、Boston Dynamics等行业领导者采纳,以加速其AI机器人研发进程。通过这些更新,NVIDIA正致力于构建一个更加互联互通、物理精确的3D生态系统,推动物理AI的边界。
Developers Build Fast and Reliable Robot Simulations with NVIDIA Omniverse Libraries | NVIDIA Technical Blog
At SIGGRAPH, NVIDIA announced updates to the NVIDIA Omniverse libraries and Cosmos world foundation models (WFMs). Powered by OpenUSD, developers can access new libraries, models…
网友讨论